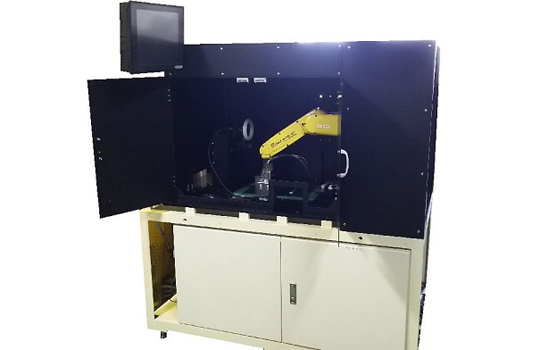
成形機から取出した成形品を受け台上に解放し、往復シリンダで移動したところを多関節ロボットが成形品を把持し、画像処理装置のカメラにかざして、成形品の形状、異物、汚れ等の複数箇所を検査する装置です。 パラレル型よりも広範囲の移動や姿勢が可能で、可搬重量も4〜7kgまでラインナップされています。
このページのトップへ








 作業工程の「困った」不良改善の「困った」設備面の「困った」などのご質問から、設備関係のお見積りまでお気軽にお問い合わせください。
作業工程の「困った」不良改善の「困った」設備面の「困った」などのご質問から、設備関係のお見積りまでお気軽にお問い合わせください。